设备概况
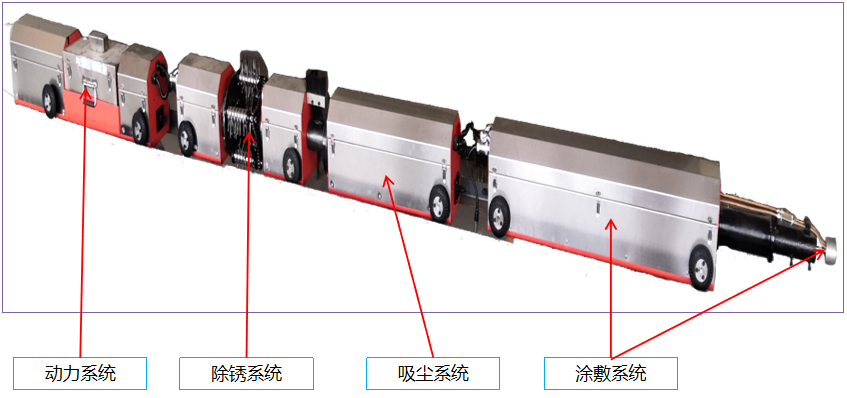
管道内LE补口机器人专业应用于钢管内焊缝表面LE喷涂作业。其结构由行走、定位、除锈、清扫、供料、旋喷和控制等七个部分组成。行走系统可控制设备在管道内沿正或反方向爬行;定位系统采用摄像头定位装置,操作人员通过控制箱上监控器可直观、准确、方便地确定要补口补伤的位置;供料系统由料仓和料泵组成;旋喷电机转速大于20000转/分钟,可使通过料泵供应过来的涂料,在高速旋转的喷枪产生的强离心力作用下得到充分的混合和高效的雾化;整套设备以PLC为核心控制部件,在完成基本操作参数设定后,设备将会在补口过程中自动完成表面清理和涂敷的工艺过程。
主要技术参数
|
机器人型号
|
YQB-Ⅰ
|
YQB-Ⅱ
|
YQB-Ⅲ
|
YQB-Ⅳ
|
|
管径范围
|
DN100~DN125
|
DN150~DN250
|
DN300~DN550
|
DN600及以上
|
|
进管深度
|
≤60米
|
≤300米
|
≤500米
|
≤1000米
|
|
旋转电机
|
>20000r/分钟
|
>20000r/分钟
|
>20000r/分钟
|
>20000r/分钟
|
|
行走速度
|
0-10米/分钟
|
0-10米/分钟
|
0-10米/分钟
|
0-10米/分钟
|
|
爬坡能力
|
≤10°
|
≤10°
|
≤10°
|
≤10°
|
|
定位精度
|
±10mm
|
±10mm
|
±10mm
|
±10mm
|
|
除锈、喷涂范围
|
≤400mm
|
≤400mm
|
≤400mm
|
≤400mm
|
|
除锈等级
|
Sa2.5
|
Sa2.5
|
Sa2.5
|
Sa2.5
|
|
单次喷涂厚度
|
≥400μm
|
≥400μm
|
≥400μm
|
≥400μm
|
|
工作电源电压
|
DC 60V
|
DC 60V
|
DC 60V
|
DC 60V
|
LE补口机器人工作方式
1、将LE补口机器人放入已焊接待补口的管段,并爬行至该管段最末端的焊缝处;
2、通过机器人自带摄像头进行焊缝定位;
3、通过机器人自带抛丸除锈 装置对焊缝内表面进行抛丸除锈,并清理焊接衍生物及拉毛新旧涂层搭接面;
4、通过机器人自带摄像头对焊缝表面除锈质量进行外观检查;
5、机器人退行中,通过自带摄像头再次进行焊缝定位;
6、采用双组份及旋涂方式,对焊缝内表面进行喷涂补口;
7、通过机器人自带摄像头对焊缝表面喷涂质量进行外观检查;
设备图片